Rising from a legacy of resilience and relentless improvement, UM::Autonomy's 2026 boat, the Orca 2.0, surges into competition
with renewed confidence and a single mission: pushing limits while enjoying every moment on the water.
Fresh off a 4th-place finish, establishing us as the top team in the US, the Orca 2.0 enters the new season as strong as ever
with its cutting-edge X-bow hull design.
To match this new platform, the team consolidated and standardized its electrical systems for resilience and faster iteration, introducing deeper monitoring over CAN and simplifying power distribution and diagnostics. On the software side, we transitioned to ROS 2 and added wind compensation backed by a matured simulation workflow and rigorous weekly in-water testing, creating a robust, modular foundation for repeatable success across core tasks.



















 The Competition
The Competition
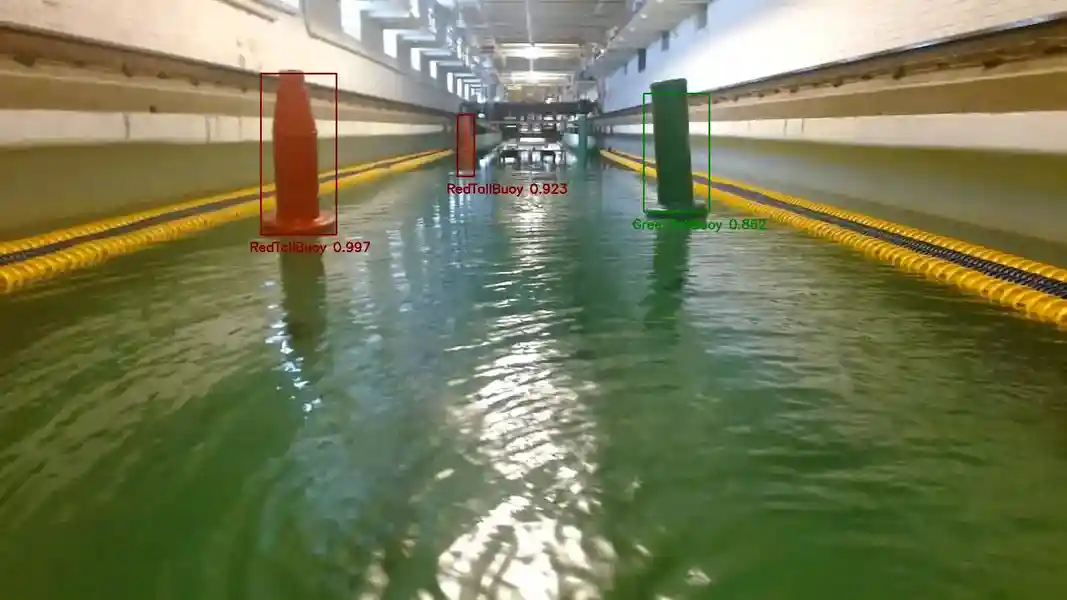
 The Boat
The Boat
 The Team
The Team



